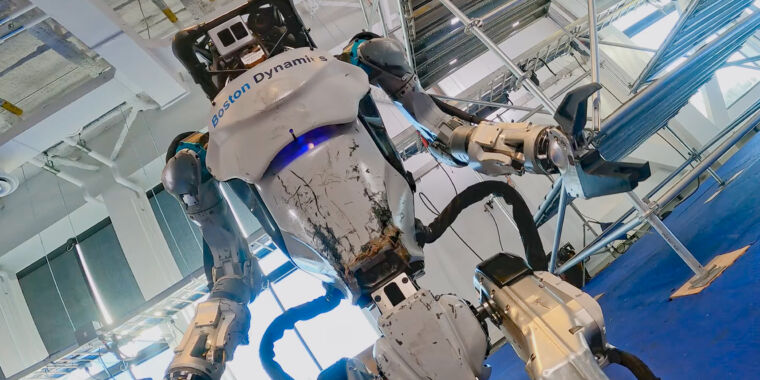
Al robot Atlas de Boston Dynamics le crecen un par de manos y prueba trabajos de construcción
-
«¡Dales las pinzas!» Atlas ahora tiene un par de garras de agarre. También podría ser hora de una nueva cubierta de cofre.
dinámica de boston
-
Las manos Atlas anteriores eran almohadillas planas o bolas, que solo pueden recoger objetos con presión.
-
La garra, de cerca. Solo el «pulgar» superior se mueve en esta imagen. También mira el daño que le hace a ese tablero. no es dulce
-
¡Levántate con las piernas!
Atlas de Boston Dynamics, el robot humanoide más avanzado del mundo, aprende nuevos trucos. La empresa finalmente le dio buenas manos a Atlas y Boston Dynamics último vídeo de youtube, Atlas intenta hacer un trabajo real. También publicó otro vídeo detrás de escena mostrando parte del trabajo que se realiza en Atlas. Y cuando las cosas no van bien, vemos instantáneas dramáticas que toma el robot en sus esfuerzos por hacer avanzar la robótica humanoide.
Como robot humanoide, Atlas se enfocó principalmente en la locomoción, comenzando con caminar alrededor de un laboratorio, luego caminando sobre todo tipo de terreno inestable imaginable, luego haciendo algunos cosas enfermas de parkour. Sin embargo, la locomoción tiene que ver con las piernas, y la mitad superior en su mayoría se sintió como una ocurrencia tardía, y los brazos solo se usaban para balancearse y mantener el equilibrio. Atlas ni siquiera tenía antes las manos-la última vez que lo vimos, solo había dos garras de bola incompletas al final de sus brazos.
Esta nueva iteración del robot tiene garras reales. Son simples manos estilo pinza con una muñeca y un solo dedo móvil, pero son lo suficientemente buenas para levantar cosas. El objetivo de este video es mover objetos «significativos» por inercia, no solo recogiendo cajas ligeras, sino objetos tan pesados que pueden desequilibrar a Atlas. Esto incluye cosas como una tabla grande, una bolsa llena de herramientas y una barra con dos pesas de 10 libras. Atlas aprende todo sobre estas «fuerzas iguales y opuestas» en el mundo.
Como todo en robótica, recoger y transportar un objeto es más complicado de lo que parece. Atlas debe averiguar dónde se encuentra en el mundo en relación con el objeto que está recogiendo, idear un plan para agarrar las manos, levantar y manipular el objeto, mientras calcula cómo ese poco de masa adicional afectará su equilibrio. Como explica el ingeniero de software de Boston Dynamics, Robin Deits, en el video: «Cuando tratamos de manipular algo como un tablero, solo tenemos que hacer algunas conjeturas bastante fundamentadas sobre dónde está el tablero, qué tan rápido se mueve, cómo debemos movemos los brazos para girar la tabla 180 grados muy rápidamente, y si nos equivocamos en esas estimaciones, terminamos equivocándonos y cayendo».
Sin embargo, Atlas no solo recoge objetos con torpeza y los lleva consigo. Corre, salta y gira mientras transporta objetos pesados. En un momento salta y lanza la pesada caja de herramientas a su compañero de construcción, todo sin perder el equilibrio. Él hace todo esto en andamios desvencijados y pasarelas de tablones improvisados, por lo que el suelo se mueve constantemente bajo los pies de Atlas con cada paso. Recoger objetos es el comienzo del aprendizaje del robot para hacer un trabajo real, y parece estar muy a gusto en un sitio de construcción difícil. Sin embargo, las pinzas de garra simples significan que Atlas aplasta todo lo que levanta, con elementos como el tablero que muestra daños visibles donde las manos se clavaron en él. Tal vez el próximo conjunto de experimentos le enseñe a Atlas a ser menos un gorila corpulento.

«Jugador orgulloso. Gurú del café. Alcoholico galardonado. Entusiasta de la cerveza. Estudiante. Aficionado a los zombis. Lector. Especialista en música. Aficionado a la comida».