Un kit mixto podría permitir a los astronautas construir robots de exploración lunar

En los próximos años, la NASA tiene como objetivo enviar personas a la luna para comenzar a construir una base permanente. La Administración Nacional de Aeronáutica y del Espacio (NASA) planea un regreso a la Luna con el programa Artemis en la segunda mitad de esta década.
Los robots pueden realizar operaciones que requieren mucha mano de obra, como construir cables, instalar paneles solares, erigir torres de comunicación y construir casas. Sin embargo, cada robot está diseñado para realizar una función o tarea específica. En este caso, una colonia lunar puede ser invadida por un zoológico de robots, cada uno con componentes y métodos de operación únicos.
Un equipo de ingenieros del MIT está diseñando un kit de piezas robóticas universales que un astronauta podría mezclar y combinar fácilmente para configurar rápidamente diferentes «especies» de robots para adaptarse a varias misiones a la Luna.
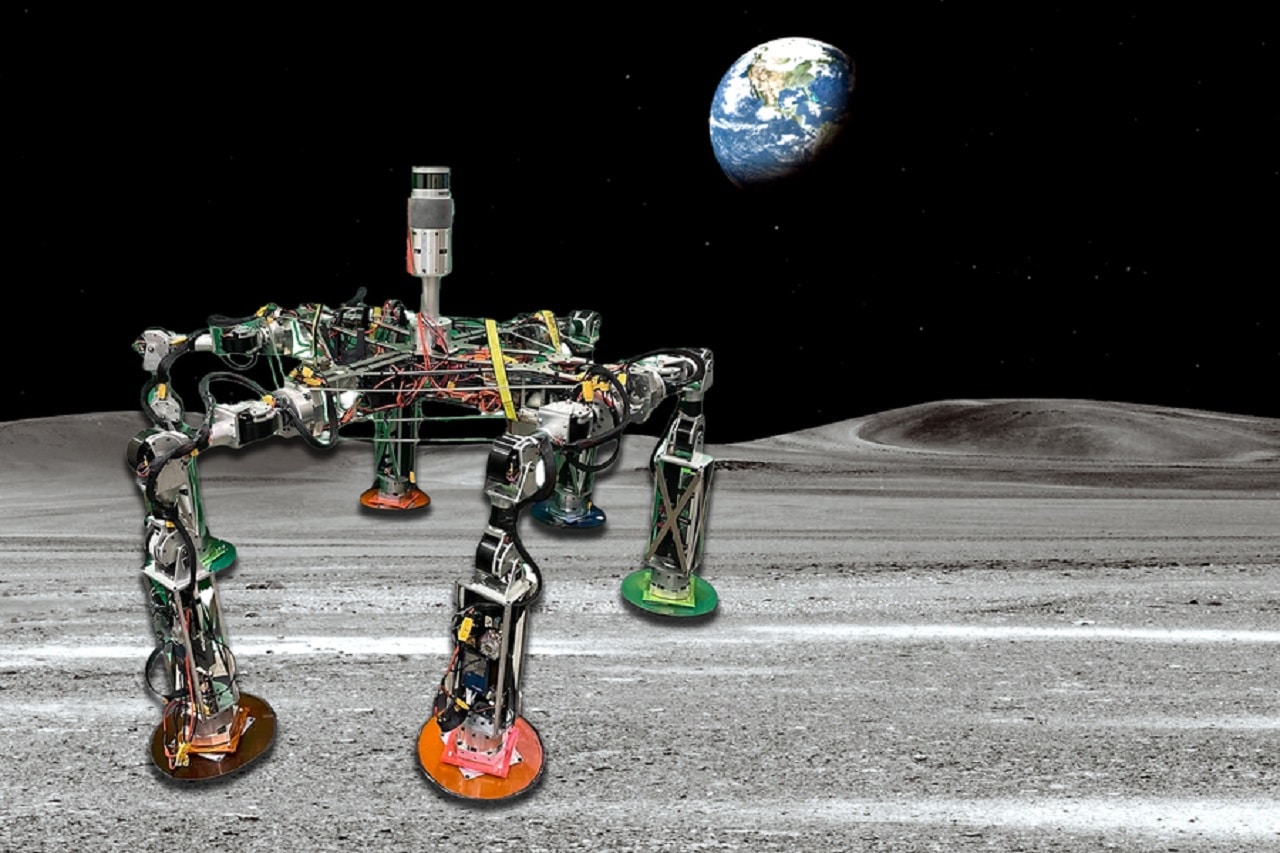
El sistema se llama WORMS, por Walking Oligomeric Robotic Mobility System. Cuenta con extremidades robóticas inspiradas en gusanos que un astronauta puede sujetar fácilmente a una base. Las piezas se pueden configurar para construir grandes robots de «paquete» capaces de transportar pesados paneles solares cuesta arriba o robots araña de seis patas que se pueden bajar a un tubo de lava para perforar agua congelada.
El diseño es flexible, duradero y rentable. El equipo construyó y demostró un robot WORMS de seis patas. La semana pasada, el equipo de Lordos presentó sus hallazgos en la Conferencia Aeroespacial IEEE y recibió el premio al mejor artículo de la conferencia.
Las partes principales del sistema incluyen el apéndice, o gusano, que se puede unir a un cuerpo o chasis a través de un «bloque de interfaz universal» que entrelaza las dos partes con un mecanismo de giro y bloqueo. Las piezas se pueden desconectar con una pequeña herramienta que libera los pasadores con resorte del bloque.
En su primera generación, cada apéndice mide alrededor de 1 metro de largo y pesa alrededor de 20 libras. En la gravedad de la Luna, cada miembro pesaría alrededor de 3 libras. El equipo planeó las especificaciones para una generación más grande con apéndices más largos y un poco más pesados, que podrían interconectarse para construir bots de «paquete» capaces de transportar cargas pesadas.

Líder del equipo George Lordos, Ph.D. candidato e instructor graduado en el Departamento de Aeronáutica y Astronáutica del MIT (AeroAstro), ha dicho, “Te podrías imaginar un hangar en la luna con estantes de gusanos” sobre los robots independientes y articulados que llevan sus motores, sensores, computadora y batería. Los astronautas podrían ingresar al hangar, elegir los gusanos que necesitan, junto con los zapatos, el cuerpo, los sensores y las herramientas apropiados, y podrían aplastarlo todo y luego desarmarlo para hacer uno nuevo. El diseño es flexible, duradero y rentable.
WORMS se concibió en 2022 en respuesta al Desafío de ideas revolucionarias, innovadoras y revolucionarias (BIG) de la NASA, una competencia anual para que los estudiantes universitarios conciban, desarrollen y demuestren una idea innovadora.
El equipo tenía como objetivo diseñar un robot lunar para navegar por el terreno extremo del polo sur de la Luna, marcado por polvo espeso y esponjoso, pendientes rocosas empinadas y profundos tubos de lava.
Se inspiraron en animales como arañas, elefantes y cabras. Se dieron cuenta de que uno de los animales más simples, el gusano, hace movimientos similares a los de un brazo.
Lordos, de ascendencia griega, ayudó a forjar GUSANOS y eligió la letra «O» para «oligómero», que en griego significa «unas pocas partes».
La estudiante de AeroAstro Brooke Bensche dijo: «Nuestra idea era que con solo unas pocas piezas combinadas de diferentes maneras, podías mezclar y combinar y obtener todos estos robots diferentes».
El estudiante graduado de AeroAstro y subjefe de equipo Michael Brown dijo: “Pensando en estas inspiraciones animales, nos dimos cuenta de que uno de los animales más simples, el gusano, hace movimientos similares a los de un brazo, una pierna, una columna o una cola. Y luego se apagó la bombilla: pudimos construir todos estos robots inspirados en animales que usan apéndices parecidos a gusanos”.
El estudiante de pregrado de AeroAstro, Jacob Rodríguez, dijo: «En iteraciones futuras, esperamos agregar más sensores y herramientas a presión, como cabrestantes, sensores de equilibrio y taladros».
Kevin Kempton, ingeniero del Centro de Investigación Langley de la NASA que se desempeñó como juez para el BIG Idea Challenge 2022, dijo: “Hay muchas palabras de moda que describen sistemas eficientes para la futura exploración espacial: modulares, reconfigurables, adaptables, flexibles, transversales, etc. El concepto MIT WORMS incorpora todas estas cualidades y más.
El concepto MIT WORMS es un sistema modular, reconfigurable, adaptable, flexible y transversal para la exploración espacial del futuro. El equipo ha desarrollado un software que se puede adaptar para coordinar múltiples apéndices. Como prueba de concepto, el equipo construyó un robot de seis patas del tamaño de un kart.
El resultado muestra que WORMS es una arquitectura duradera, fácil de mantener, de bajo costo, escalable, versátil, flexible y modular para ensamblar rápidamente robots para terrenos extremos y pesados.
Referencia de la revista:
- George Lordos, Michael J. Brown, et al. GUSANOS: Robots reconfigurables de campo para terrenos lunares extremos. Conferencia Aeroespacial IEEE.